Автор: V.M. Radionov
Категории:
mining production
Identification of parameters of some technological objects of the ore processing stage is hampered by the limitations of measuring the state of the control object, impossibility of forecasting noise and disturbance values. Control systems based on minimization of regulatory errors when determining the object state variables take into account intrinsic properties, order of the object, its delays, real change of parameters of noise and disturbances.
Keywords: hydrocyclones, parameter identification, vector control.

V.M. Radionov
junior researcher, graduate student.
National University of Krivoy Rog
When designing a hydrocyclone operated control system it is necessary to consider high speed, nonlinearity of separation processes, rapid stochastic change of properties, and the composition of the pulp. This defines the requirements to the information support system.
To measure the input and output parameters of multiphase flows of the hydrocyclone ultrasonic treatment and control systems are applied [1-4].
The effectiveness of classification management in cyclones depends on the quality of information support at stochastic changes of the pulp parameters. When classifying the iron ore pulp due to the size of the particles of the solid phase the information on the granulometric composition is urgent. Devices of ultrasonic influence and control are applied to determine the pulp granulometric composition. Along with this the pulp is pulsewise affected by means of the high-energy ultrasound and characteristic changes are monitored in the utrasonic probing channel. Solid particles within the slurry are spatially redistributed in the controlled volume being dynamically affected by the high-efficiency adjustable intensity ultrasound. Interdependence of the velocity of particles and the distance from the source of exposure is defined as [6]
, where  (1)
(1)
The expression shows, that the r -size particle' speed from its z- coordinates, intensity ultrasound exposure I, and the ratio а, which depends on the frequency. Knowing the ultrasound parameters and exposure time we can determine the nature of the spatial redistribution of particles by size.
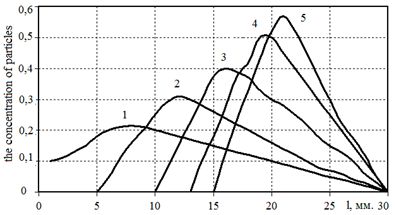
Figure 1 Variation in the concentration of particles by size grades in the ultrasonic field, 1- r=1mm, 2- r=0.5mm, 3- r=0.2mm, 4- r=0.01mm, 5- r=0.05mm.
Moreover, the analogy of such spatial redistribution to redistribution of particles under the influence of the complex of centrifugal forces in the field of the hydroclone is traced. Change in the intensity of ultrasonic influence by its nature is similar the change in the pulp pressure alteration at the inlet of the hydrocyclone. The forecast is possible, as well as the correction of parameters synchronously with pulp supply to the hydroclone. The present paper considers the content of the control grades in the cyclone feeding and draining systems for the formation of vectors of input-output of the control. Control problem – the maximum transfer of the particles of the control size grades contained in the pulp from the feeding system to the draining system of the cyclone, or minimization of the input-output vector error.
Evaluation of granulometric composition of the solid phase of the pulp or the content of the control size grades performed through the analysing the changes of volume attenuation of ultrasonic waves in the control channel at the moments of high-energy ultrasonic influence  , and at the moments of the absence of such effects
, and at the moments of the absence of such effects .
.
 (2)
(2)
 (3)
(3)
The ratio of the decay of these signals depends on the intensity of the ultrasonic field, time of exposure and distribution of particles by size and density. Selecting a strong intensity and frequency of ultrasound, location of probing channel is performed based on the maximum sensitivity value S1/S0 to change of the size or density of the particles.
The dynamics of the object is defined due to the information about the output deviations in the control object depending on the input parameters based on actual noise and disturbances. Control problem can be solved by determining the internal structure of the control error, parameters of which will allow considering internal properties of the object, its delays. For this purpose both controller input values and control object output values shall be measured taking into account the effects of noise and disturbance, as well as time (phase) modulations of these values [5].
The target function of the ACS on the basis of the regulation vector error can be presented as: [2]
 (4)
(4)
The model of a control system with a nonlinear function of the control object, described by differential equations in the form of Cauchy by the control object output.
 (5)
(5)
where f(*)-non-linear function of the control object.
For this model, controls by the actual, the imaginary component and of the complex error modulus:

 (6)
(6)

where К - the corresponding coefficients of the regulator.
To ensure the control system stability based on the second method of Lyapunov's theorem on stability for nonlinear systems, and the definition of the Lyapunov’s function in a square form in reference to the applied component of the complex error at the controller input and control signal [5]. The upper boundary of the regulators’ factor bands in compliance with the conditions of stability of ACS with vector control and the constant coefficient Kв:
 (7)
(7)
Elimination of influence of nonlinear function f (*) of the controlled system on the stability is possible provided:
 (8)
(8)
Definition of the setup value pattern of change r, affecting the change in the control input u
 (9)
(9)
Determining factors ensuring the stability of the ACS nonlinear control object with vector control are those of certain modulations in the phase offset between the change in the vector setting and the output vector of the non-linear process control and the setpoint pattern of change in accordance with (8), (9).
In general, the regulation law for N-PID of the regulator can be presented as
 (10)
(10)
Overriding regulator factors are defined at each regulation cycle in accordance with the values of actual and imaginary components of the vector error and direct N-PID regulator output u(k-1) at the previous step of regulation. Speed algorithm of N-PID controller based on vector errors
 (11)
(11)
On the basis of the MATLAB approaches an example of the hydrocyclone particle size distribution drain control is considered, by the pressure regulating of the hydrocyclone sand pump, according to the results of the ultrasonic control of parameters of pulp, on the basis of minimizing the vector regulation error. Presented for comparison are the results of simulation of the control size grades output in the discharge of the hydrocyclone, with the factor of randomization taken into account, at stabilization of pressure pulp at the hydrocyclone inlet, fig.2, and the regulation of particle size distribution to minimize errors in the size grades, fig.3.
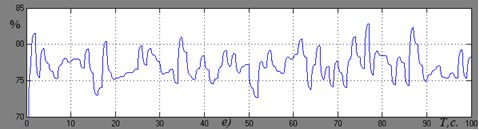
Figure 2 The output of the control class size at stabilization of pressure at the cyclone input.

Figure 3 The output of the control size grades at regulation with minimization of the error on the content of the control size grade.
Conclusions
The developed particle-size composition control system of the hydrocyclone drain on the basis of ultrasound information-measuring system can both improve the quality of separation, and reduce the output fluctuation of control class sizes from 10% to 4%. In this case the standard deviation of the simulation results and experimental data by near-mesh grain size - makes up 1, 57%, by control grain size grade – 0, 67%.
References
1. Morkun, V. S., Morkun, N. V., Pikilnyak, A.V. (2014). Modeling of ultrasonic waves propagation in inhomogeneous medium using fibered spaces method (k-space), MetallurgicalandMiningIndustry, No2, p.p. 43-48.
2. Morkun, V. S., Morkun, N. V,. Pikilnyak, A.V. (2014). Iron ore flotation process control and optimization using high-energ yultrasound, MetallurgicalandMiningIndustry, No2. p.p. 36-42.
3. Morkun, V. S., Morkun, N. V,. Pikilnyak, A.V. (2014). Ultrasonic facilities for the ground materials characteristics control, MetallurgicalandMiningIndustry, No2, p.p.31-35.
4. Morkun, V., Goncharov, S., Pikilnyak, A., Krivenko, A. (2012). Iron ore benefication processes optimization. ТЕKA. Commision of Motorization and Energetics in Agriculture 12, no.4,162-166.
5. Agamalov, O.N., Lukash, N.P. (2008). Alternativne neliniyne PID-upravlinnya z vycorystannyam vektjrnoi pomylki. Elektrroinform, No2, p.p. 8-13
6. Radionov V.M. Sposob upravleniea granulometricheskim sostavom vekhoda hydrocyklona na osnove sredstv ultrazvekovogo vozdeystveya I controlya, Vestnyk Krivoy Rog national university, No37, 2014, p.p. 235-238.