Автор: Kharlamenko Vadim
Категории:
automatization
Adaptive identification of load moment on the working rolls of break-down mill based on inverse dynamic problem
There considered the method of identification of load moment on working rolls of break-down mill on blooming on the base of inverse dynamic problem with implementation of adaptation of model coefficients by Kachmazh modeling algorithm.
Keywords: identification; algorithm; adaptation; model.
The main technological element of blooming is break-down mill, working rolls which are situated under the permanent random load. This object is characterized by the following specific phenomena such as slip, caused by sharp change of the external friction moment. Meanwhile there occurred redistribution of load moments on the working rolls. By the nature of one redistribution it is possible to define the type of slip and intensity of load on working rolls. Therefore, for formation of control actions appropriate to the technological situation it should be determined uncontrolled static moments Мbu(t) and Мbl(t) for the upper and lower working roll respectively.
To solve this identification problem, it was decided to use the method of inverse operator based on the theory of inverse dynamic problem (IDP). Application of IDP enables, on the known motion trajectory of phase coordinates, to determine the forces affecting on the object management controlling.
The inverse dynamic problem is defined as follows [1]. Let the known mathematical model of system is F(t),its initial state is established as  ,
,  . The desired motion trajectory is determined
. The desired motion trajectory is determined  and
and  , t≥0. It is necessary to find out the force
, t≥0. It is necessary to find out the force  , t≥0, which stimulates movement of system on the known motion trajectory
, t≥0, which stimulates movement of system on the known motion trajectory  ,
,  , t≥0.
, t≥0.
In general terms, structural scheme of model, which realizes the identification IDP methods can be represented as follows (Fig. 1).

Fig. 1. Generalized scheme of identification based on IDP
Vector of perturbations for the working rolls of the crimp cage, that need to be identified is N(t)=[Мbu, Мbl], vector of input measuring signals - y(t)=[Usu, Іu, Usb, Іb], where Usu and Usl - set point voltage for the upper and lower drive motors respectively. Meanwhile the total current is the sum of the currents through the burden channel and set point Іu(b) = ІМb + ІUs.
Then, the signal of the burden current ІМb equals ІМ(u)b= Іu(b) - ІUsu(b).
Structural scheme describing the subsystem of identification of the load moment on working rolls by OM method is shown in the Fig. 2. The basic idea is to determine the burden current ІМb by the known transfer function according to the channels "burden moment - burden current Мb-ІМb and "set point signal - set point current" ІUs, and by known input influence І and ІUs. This signal is the input influence of transfer function, inverse to transfer function of the channel "burden moment - burden current" Мb - ІМb. However, if the time constants are calculated basing on the parameters of the object, which may vary depending on the conditions of rolling, in the subsystem of identification there foreseen blocks of adaptation of parameters of transfer functions.
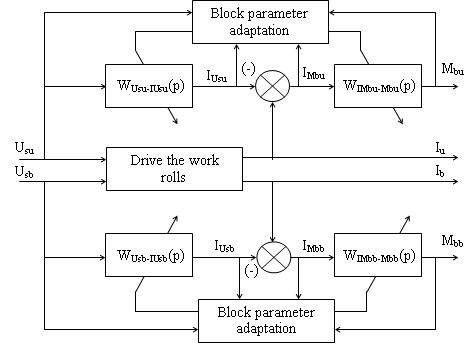
Fig. 2. Structural scheme of the subsystem of moment identification of burden on working rolls by inverse model method
Let us consider the problem of parameter estimation of transfer functions  ,
,  ,
,  ,
,  , which dynamics, in general, can be described by the equation
, which dynamics, in general, can be described by the equation  , where
, where  ,
,  - input and output signals, respectively for TF, which parameters should be set up,
- input and output signals, respectively for TF, which parameters should be set up,  - vector of parameters that should be set up.
- vector of parameters that should be set up.
For this problem the algorithm of Kachmazh is better to introduce in iterative form [2]

where n = 1, 2, 3 ... m - iterations of the algorithm.
In spite of the stability and permissible convergence of the Kachmazh algorithm, its drawback is that, when the components of the vector  are tended to zero, value of
are tended to zero, value of  may become equal to zero, i.e. parameter estimation, which is formed by the expression (1) may become unstable [2].
may become equal to zero, i.e. parameter estimation, which is formed by the expression (1) may become unstable [2].
Therefore it is advisable to use modification of Kachmazh algorithm proposed in [2]
 (2)
(2)
where  ,
,  .
.
Fig. 3 shows modeling results of the subsystem of identification during unilateral slip on the lower working roll.
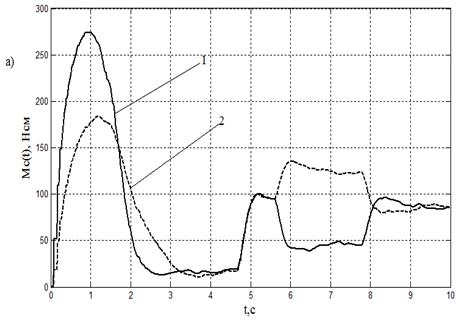
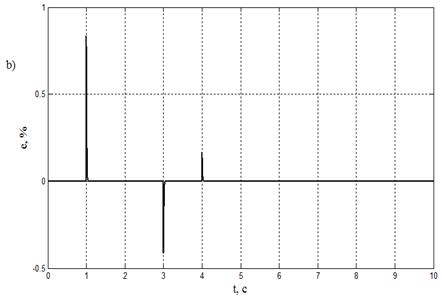
Fig. 3 Modeling results of identification of the static moment on the working rolls of the break-down mill during unilateral slip on the lower working roll: a) identified static moments of working rolls (1 – lower roll, 2 - upper roll) while loading the lower roll, Нс m; b) error of static moment identification,%
In this case there is a redistribution of load moments, and herewith there takes place load decrease on the lower roll Мbl(t)=40 Нс· m and and increase of load on the upper roll to Мbu(t)=135 Нс·m.
Conclusions. The author suggests to identify the load moment on the working rolls of break-down mill. Herein, Kachmazh modeling algorithm of adaptation, as the most suitable for identification in real-time mode is proposed to be used in order to adapt coefficient identification model. Fulfilled modeling showed the effectiveness of using this algorithm for adaptation of non-stationary coefficients of the load moments identification model. Analysis of the results obtained showed the asymptotic character of change of model parameters that should be set up. Convergence of parameters to actual values occurs for allowable time - tсonv=0.3с.
References
- Krut’ko P.D. Obratnye zadachi dinamiki v teorii avtomaticheskogo upravleniya (Inverse problems of dynamics in the theory of automatic control). Moscow, Engineering, 2004, 576 p.
- Lyashenko S.А. , Lyashenko А.S. Evaluation of the pseudo regression model. ААECS. 2010. No1(25), p.36 – 41.
- Goodwin G.C., Ramadge P.J., Caines P.E. Discrete time multivariable adaptive control. IEEE Trans. Aut. Control. 1978. Vol. AC-25. No2. p.449 – 456.